2015-08-11
Skysurfer 1.4 米爽飛 APM 2.5 電腦導航
今日就介紹把 Skysurfer 1.4M 載機加入 APM 2.5 飛控。Skysurfer 是天捷力公司生產之入門遙控飛機。有賣模型網站 OEM 其設計為 Bixler,應該是取自 FliteTest 其中一個 hosts 的名字。
Agile Hobby 雖然很喜歡遙控飛機,但我們對一架自己曉飛的飛機更加有興趣。APM 2.5 性能雖不及 Pixhawk,但對初學者來說,撞了架平的飛機都不太心痛。

配置如下:
- APM 2.5
- HobbyWing 40A ESC
- Sony 600 TVL CCD Camera
- Spectrum Receiver + JR Transmitter
- u-blox LEA-6M GPS
- Telemetry 模組
- Current sensor 模組
- Video Transmitter
- SunnySky X2212 KV2450 Brushless Motor
- APC 6040 Prop
- RFI 3300mAh 30C 3S LiPo
- 9 gram servo X 4
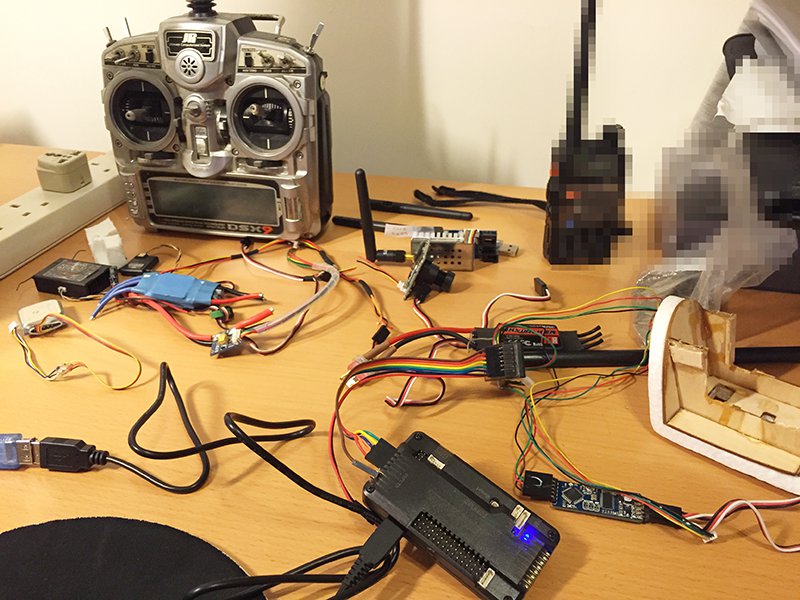
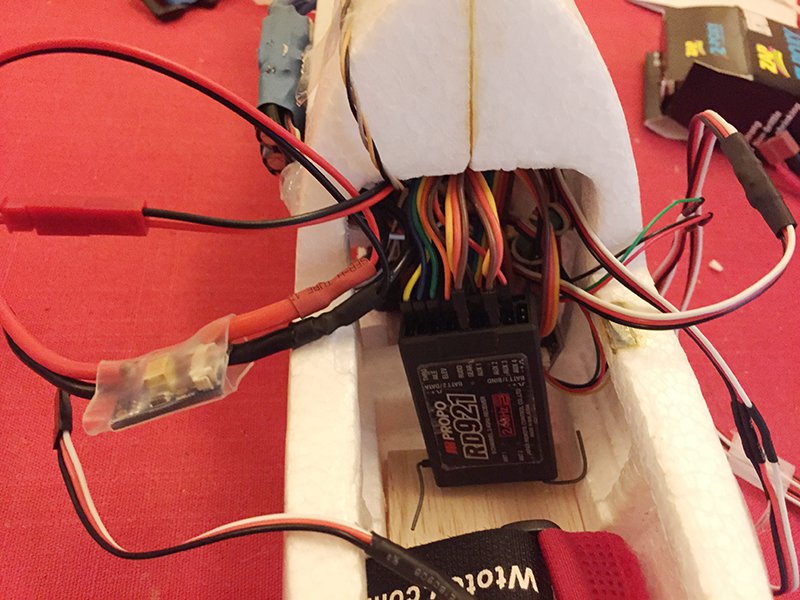
由於 Skysurfer 1.4M 的機身不是太寬敞,放置各電子零件需要更多心機。務必測試好所有 APM 的功能,才好放 avionics 進飛機。
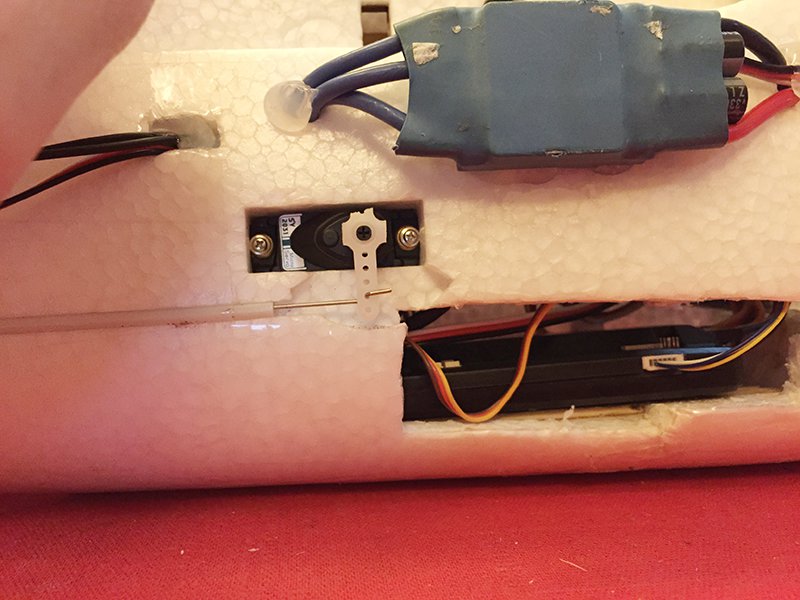
由於機身一點多餘空間都沒有,只可以放 ESC 到機身的右面。好處是通風比較好一點,線路也較整潔。
另外,加了一條 SMA 伸展線到機頂,方便連接 Telemetry 模組。在撞機時,Telemetry 模組不會受損。
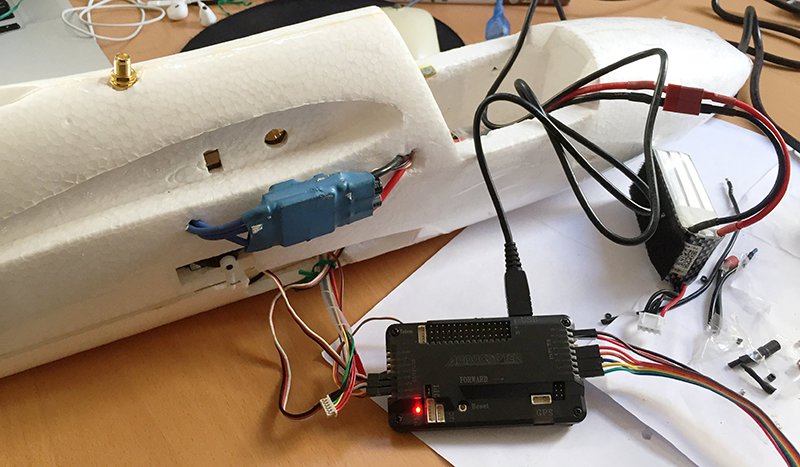
機身的側面開了一道活門,放入 APM 2.5。設置好 APM 後,可以把它上實,防止飛機空中解体。
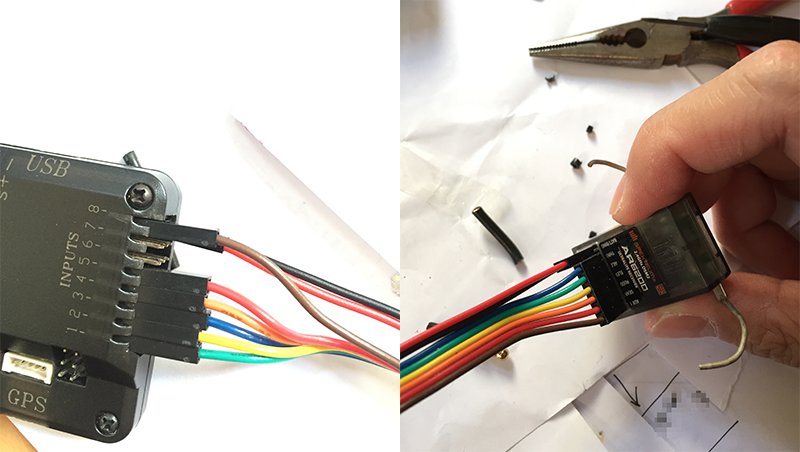
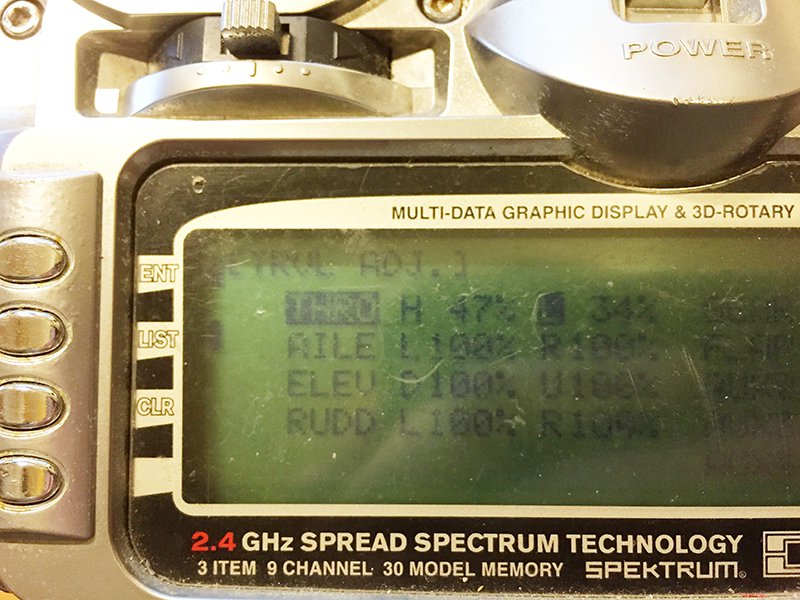
由於今次是用 JR 控去連接 Spectrum 的 receiver, 所以接線跟 Futaba 及 Frsky Taranis 會有不同。
當然要設置好 JR 控上各 channel 的中位及行程。
RC Receiver 及 Current sensor 模組都是剛剛好放進機頭,加入了 3300mAh 的 3S 電池,CG 就剛剛好。
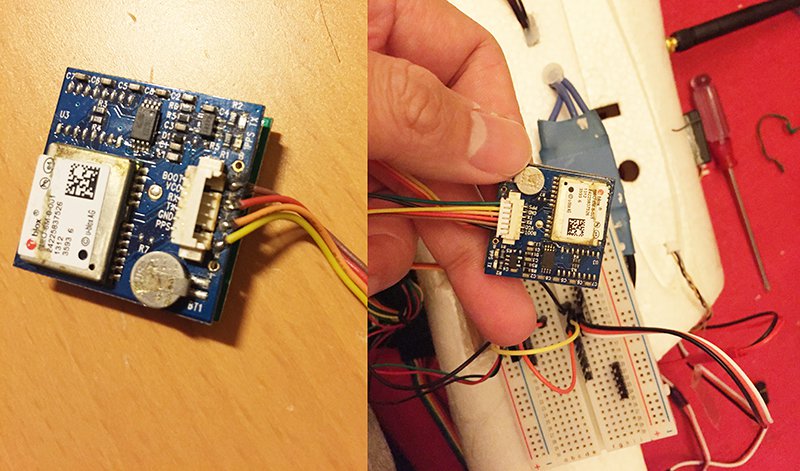
這次其實筆者是幫朋友安裝的。發現 u-blox LEA-6M GPS 的接線只有丁點連接到焊位,若果飛機空中震斷其中一條線,有可能導致飛機無法返航。
安全計,都是由頭把線做過一條新的。
把 GPS 及圖傳放上機頂及機尾後,就到空地去較準 GPS 及 Compass。用 telemetry 去做較準一定比用 USB 線連接方便。始終要把 1.4M 的飛機轉來轉去,有丁點難度。
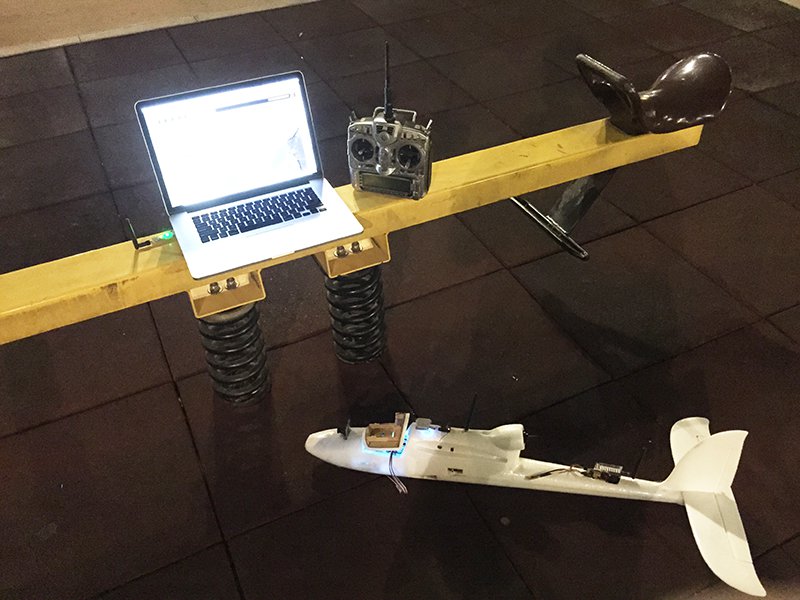

以下就是 Youtube 的飛行視頻:
飛後感想:
今次我們的 Skysurfer 1.4M 配置用上 SunnySky X2212 KV2450 無刷電機比平常的快了得多,飛機的爬升率都高,只消 20 秒就可以上到 100 米。但飛行時間就只有 10-13 分鐘左右。
各 FBWA, FBWB 及 RTL 回家模式都沒有問題。
如你想用 Skysurfer 1.4M 自己造一架 drone 的話,請用一個比較低 KV 的無刷電機比較合適。