2015-01-07
450 四軸機架 Multiwii 2.2
如果你有興趣了解四軸機的計算機編程,Multiwii 2.2 必定是最好的入門平台。
四軸機有不少開源計劃,包括有 KK, Multiwii, Arducopter 及 OpenPilot。 最容易暸介軟件設計的就是 Multiwii。
由於 Multiwii 的源碼都是用 Arduino 所編譯成,語法比較簡單。但是,設置 Multwii 會比其它平台複雜。
今次使用的機件配置如下:
- HJ 450 機架 (彷 DJI F450 機架)
- SunnySky 2216KV880 Angel Series 電機 + 1040 螺旋槳
- Crius Multiwii v2.2 飛控板
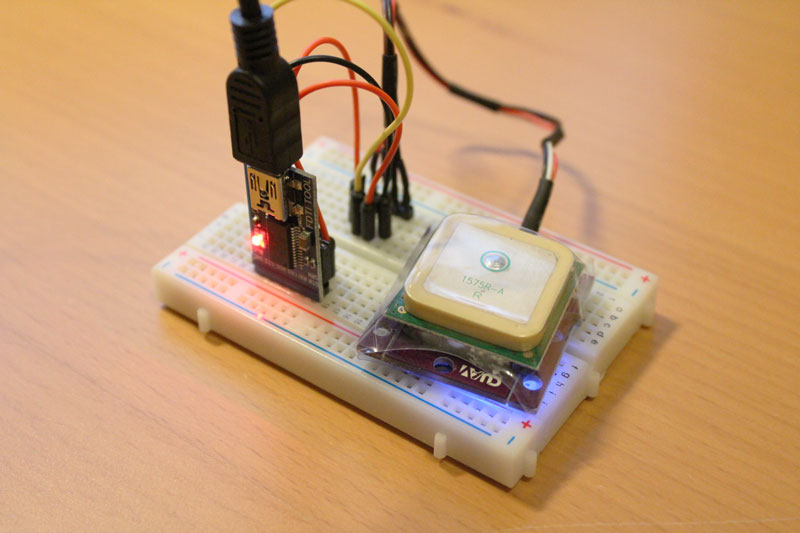
- UBlox LEA-6A GPS

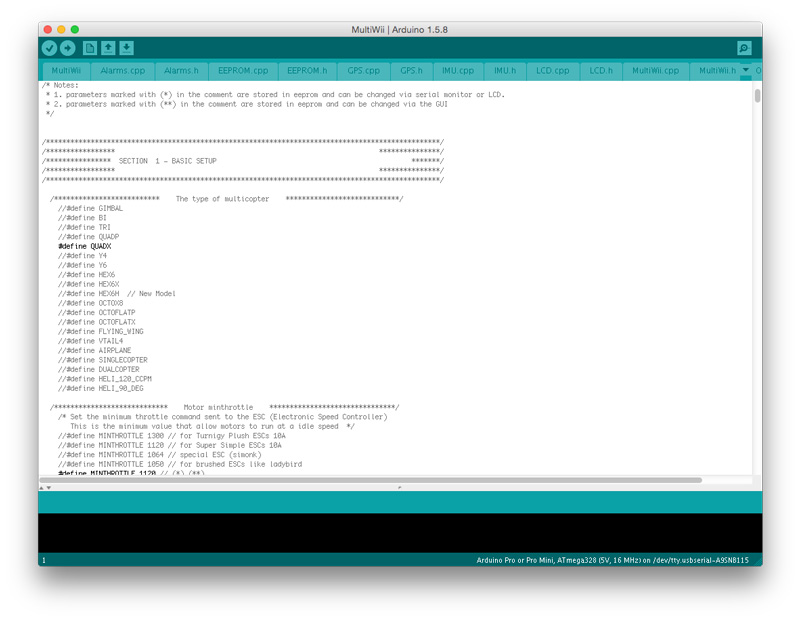
設置 Multwii 軟件主要是下載 Multiwii 的代碼 https://github.com/multiwii/multiwii-firmware,然後用 Arduino 的開發環境,經 FTDI adaptor 上傳到 Multiwii 的飛控板,即成。
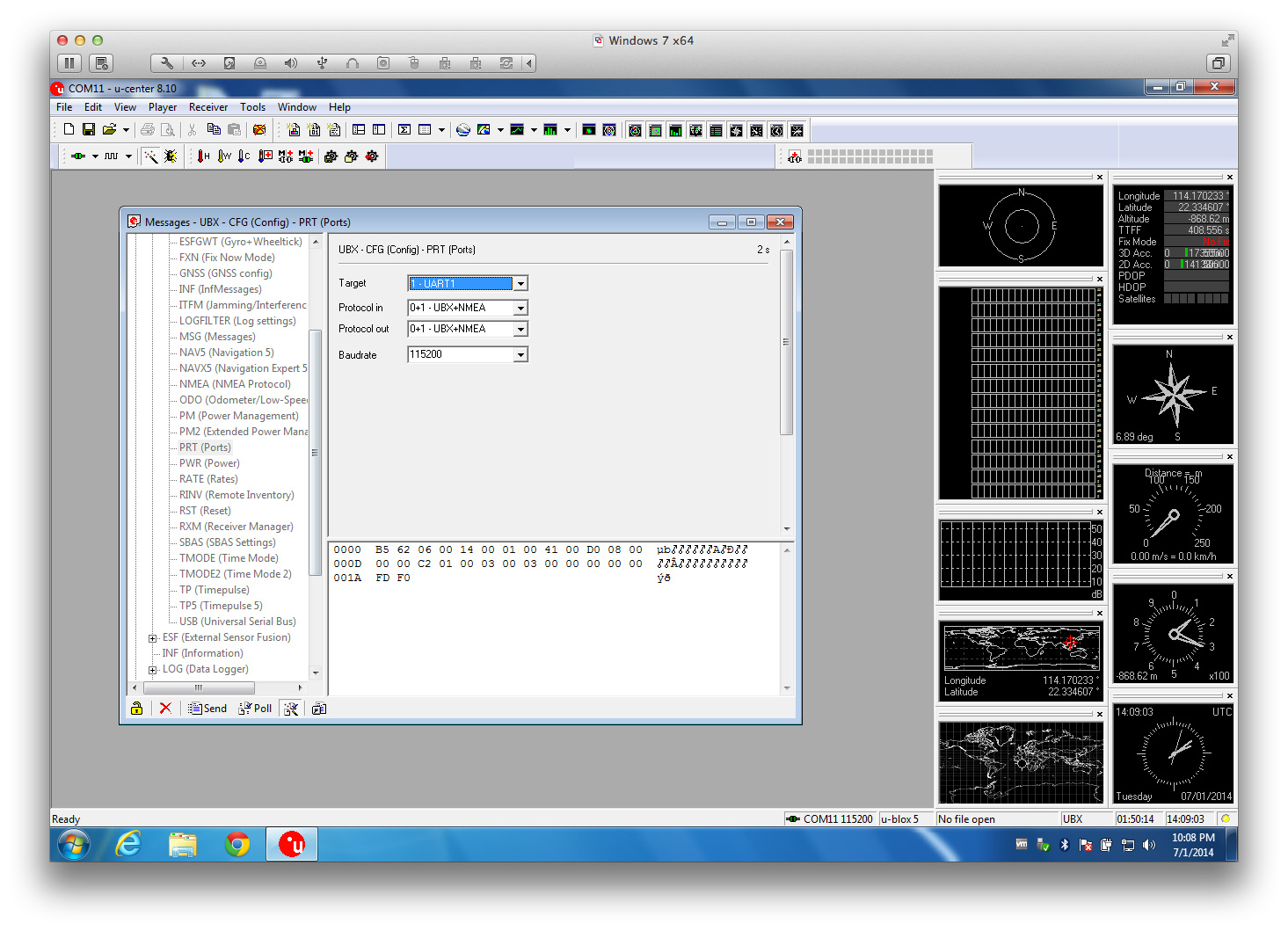
設置 GPS 主要是使用 UBlox 的 UCenter,利用 FTDI 上傳 GPS 配置。
適合 Multiwii 用的 GPS 大部份都是經過 i2C 連接到 Multwii 的 Serial port,該連接板雖要用 i2c-gps-nav 去設置。
請看 Crius SE V2.0 - Adding GPS via a i2c board to a Multiwii 去了解更多。
完成全機組裝後,需用 Multiwiiconf 去完成軟体配置。
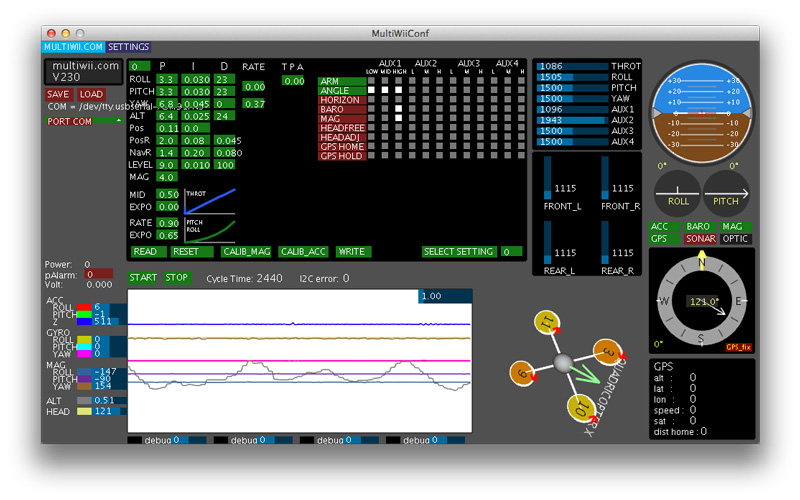
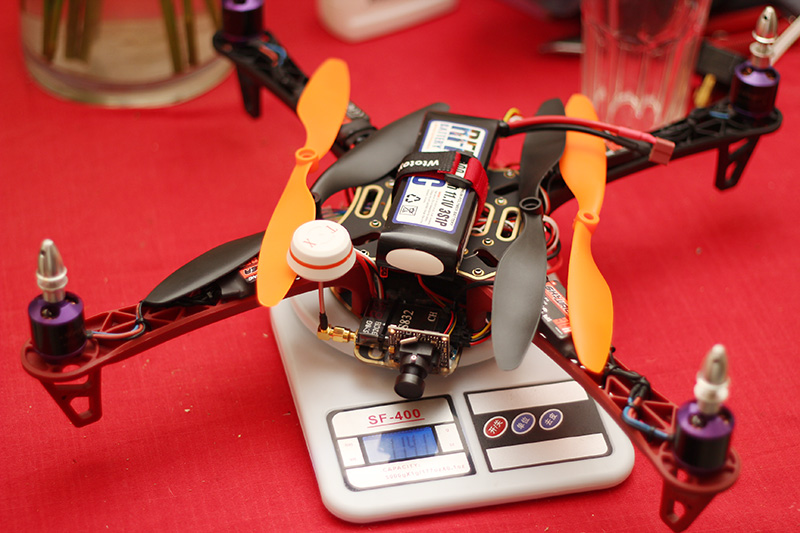
我們組裝的 450 機的總重,是 1141g。

以下是試機片段。由於 SunnySky 的 Angel Series 電機質量比較差,飛行作 FPV 會比較抖動。如要買 SunnySky 系列電機,都是 X series 的會好。
以下是 FPV 片段。
Multiwii 機我們建議你作「視距內飛行」,因為 Multiwii 沒有 GPS failsafe 自動回航。但作為四軸視距操控,一定是最便宜的選擇。
下幾集會介紹其它四軸平台,包括 APM,OpenPilot 及 Naze32。